|
|
|
Lecture #2, Sept 8, 2005 |
|
RSS II |
|
Una-May O’Reilly |
|
|
|
|
Intuition of BB design with an example |
|
Overview |
|
Practicalities |
|
|
|
|
|
|
|
|
|
What task is the robot doing? |
|
Searching for pucks |
|
When it finds one, pushes it to vicinity of the
light source, goes to find another |
|
Avoids or escapes from encounters with other
objects |
|
|
|
|
Task is decomposed as a set of simple behaviors
(algorithms connecting sensors to actuation) that, when acting together,
produce the overall activity |
|
|
|
|
|
|
|
|
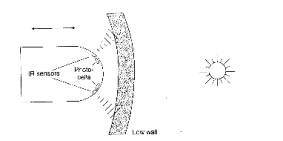
The robots in BSim are circular differential
drive robots with a bumper, two IR proximity sensors, two photo sensors and
wheel encoders. The photo and IR sensors face diagonally from the front of
the robot at 45 degree angles. |
|
Each robot supports a simple, yet powerful,
behavior-based programming system which includes a set of primitive
behaviors and a priority list arbiter. |
|
A robot's program is called a task. A task is a
prioritized list of behaviors which all simultaneously compete to control
the robot. |
|
The
arbiter chooses which behavior is successful. You can program each robot by
configuring a set of behaviors, prioritizing the behaviors for the arbiter,
and then loading the behaviors into the robot. |
|
|
|
|
Cruise: drives the wheels at constant
speeds. The behavior can try to drive the wheels at any speed, positive or
negative, but the robot speed will max out at +/- 255. |
|
Home: tries to drive the robot toward a light
source. It uses a proportional controller to home on a light source
whenever the robot’s photo sensors see light. The robot homes on the light
by pivoting in the direction of the light and then moving forward a step.
The robot determines the direction to the light by calculating the
difference between the two photo sensor measurements.. |
|
Avoid: Moves robot forward and left if the right
proximity sensor is on, or forward and right is the left proximity sensor
is on (if gain is positive). With a negative gain (in collection task) it
goes toward an obstacle (eg a puck or wall) |
|
|
|
|
|
|
Escape:a ballistic behavior triggered whenever
the robot bumps into something. The behavior is performed in three steps:
backup for a specified amount of time, spin a certain angle, and go forward
for a specified amount of time. |
|
Anti-Moth: a ballistic behavior that triggers
whenever the total light intensity measured by a photocell exceeds a
threshold |
|
Dark-push: a ballistic behavior. It triggers
whenever the robot tries to push something when no light is visible. |
|
|
|
|
|
|
There’s no explicit FindPuck behavior |
|
No PushPuck behavior |
|
No DropPuck behavior |
|
These emerge from the interaction of the more
primitive behaviors |
|
System behavior is not deterministic, but has
random components |
|
Overall behavior is robust - ultimately collects
pucks |
|
No representation of the world and no state |
|
|
|
|
|
|
Contrast between good old fashioned Artificial
Intelligence (GOFAI) and behavior-based AI |
|
GOFAI: Thought experiments on the nature of
“intelligence” in creatures with bodies |
|
BB-AI draws inspiration from neurobiology,
ethology, psychophysics, and sociology |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Simple creatures occupy very complex worlds |
|
they are not all knowing masters of the worlds |
|
they act enough to capitalize on specific
features of the world |
|
|
|
They do not have enough neurons to build full
reconstructions of the world |
|
|
|
The `diameter’ of their nervous systems is very
small (about six for humans) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Handles multiple goals via different behaviors,
with mediation, running concurrently |
|
Multiple sensors are not combined but
complementary |
|
Robust: graceful degradation as upper layers are
lost |
|
Additivity facilitates easy expansion for
hardware resources |
|
|
|
|
|
How should the task be decomposed? |
|
Not a science! |
|
On behaviors and arbitration |
|
How should it be debugged? |
|
What will bite you! |
|
|
|
|
State the problem clearly |
|
Identify any unstated assumptions about human
competency that robot may not have |
|
State simply the set of minimum competencies
needed to achieve the task |
|
Look for methods that will enable each
competency using your robot h/w |
|
Match the
questions that should be asked with sensors that can answer them |
|
Write behaviors that implement the methods and
connect the behaviors to fixed priority arbiters |
|
Assume sensors will be noisy! Plan for graceful
degradation |
|
Accept methods that, on average, advance the
task |
|
Strive for robustness ahead of efficiency |
|
|
|
|
|
|
Whenever (X) do |
|
Else-whenever(Y) do |
|
Etc |
|
Always
sensing, looks for trigger then exerts control: |
|
A behavior always monitors specific sensors, |
|
it uses
a threshold of their values to dictate when it will attempt to control a
set of actuators: TRIGGER |
|
|
|
|
|
|
|
|
Servo behavior has a feedback loop |
|
Eg: light-positioning behavior |
|
Never completes |
|
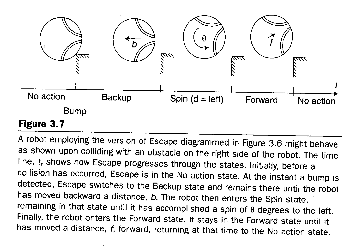
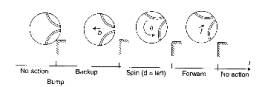
Ballistic behavior, once triggered continues to
completion without any sensing |
|
Eg: Escape behavior |
|
1. Back up a preset distance |
|
2. Spin a preset number of degrees |
|
3. Move forward a preset distance |
|
Use with caution due to sequential nature |
|
Try to solve with servo behavior first |
|
|
|
|
|
Behaviors have no (or little) state |
|
They live in the ‘here’ and ‘now’ without memory |
|
Use an FSM to for analysis and design to see how
every event is being handled |
|
|
|
|
|
|
|
|
|
What to do with behavior 1 is not distinct from
behavior 2: |
|
Eg. While reacting to one collision another
occurs (while escape is running) |
|
Don’t add in special cases “overloading a
behavior” |
|
Create a third behavior that looks for the
trigger of behaviors 1 & 2, and controls that situation |
|
|
|
|
|
|
Two different behaviors are alternatively given
control or two parts of one behavior contradict each other. |
|
|
|
|
|
|
|
|
|
|
|
Remedy: cycle-detection behavior |
|
A series of rapid back and forth wheel motions
or lack of progress |
|
Remedy: Table analysis, |
|
|
|
|
|
|
|
|
When to arbitrate: |
|
Eg. wander-behavior and recharge-behavior |
|
What to decide? Average, take turns, vote |
|
Use urgency |
|
Consider graceful degradation |
|
Use fixed priority arbitration for most cases |
|
Can have multiple arbiters for different
actuators |
|
Arbiter can report how it arbitrated |
|
|
|
|
|
|
|
Develop and test each behavior in turn |
|
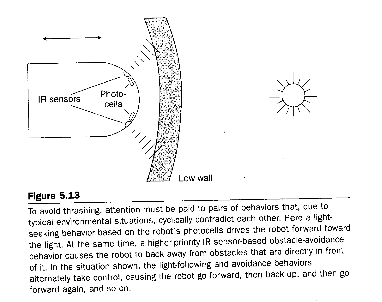
The difficulty will lie in understanding and
managing the interactions between behaviors |
|
Example: thrashing |
|
Set up a debug tool: indicated which behavior is
active, sensor values, state of arbiter |
|
Could be tones or GUI |
|
|
|
|
|
Example |
|
Overview |
|
Practicalities |
|
Next |
|
Consider implementation with Carmen and Java |
|
Consider BB approach for challenge |
|
More sophistication in BB creature - mapping |
|
Subsumption: Example instance of BB design |
|
|
|
|
|
|
Brooks, R. A., "New Approaches to
Robotics", Science (253), September 1991, pp. 1227-1232. |
|
Brooks, R. A. and A. M. Flynn "Fast, Cheap
and Out of Control: A Robot Invasion of the Solar System", Journal of
the British Interplanetary Society, October 1989, pp. 478ミ485. |
|
Brooks, R. A. "A Robust Layered Control
System for a Mobile Robot", IEEE Journal of Robotics and Automation,
Vol. 2, No. 1, March 1986, pp. 14-23; also MIT AI Memo 864, September 1985. |
|
Robot Programming: A Practical Guide to
Behavior-based Robotics, Joseph L. Jones, McGraw-Hill, 2004. |
|
Lecture #1, Introduction, Prof. Ian Horswill http://www.cs.northwestern.edu/academics/courses/special_topics/395-robotics/ |
|
“Sensing and Manipulating Built-for-Human
Environments”, Brooks et al, International Journal of Humanoid Robotics,
Vol 1, #1, 2004. |
|

 Notes
Notes{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}